Roboguide es el líder en programación de productos fuera de línea en el mercado de robótica y simulación de plantas. La familia de paquetes de software Roboguide enfocados en el proceso permite al usuario crear, programar y simular una celda de trabajo robótica en 2D sin necesidad de contar con el dispositivo en físico y sin el gasto de instalar un prototipo de una celda de trabajo. Con los robots virtuales y los modelos de celdas de trabajo, la programación fuera de línea de Roboguide reduce el riesgo al permitir visualizar un plano de celda de trabajo con un único o múltiples robots antes de la instalación actual. Si tiene consultas contáctenos y con gusto podemos hablar con usted sobre el software de simulación.


Creación sencilla de planos con dispositivos y máquinas

Mejorar y depurar fuera de línea sin tiempo de inactividad o pérdida de producción

Importar datos CAD para una vista y sensación real de la aplicación
Ruta de planificación sencilla con animación

Simulación precisa entre el mundo real y el virtual

Herramientas de aplicación altamente eficaces para simplificar los esfuerzos de programación
Desde el diseño hasta la confirmación
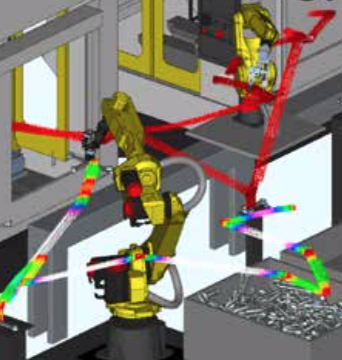
Con la biblioteca CAD tiene acceso completo a todos los Robots, Máquinas y herramientas sencillas de FANUC. La simulación del robot y la función de perfilado incluyen un paquete completo de detalles de verificación de procesos, incluyen movimiento, validación del tiempo de ciclo y detección y prevención de colisiones. También está disponible con herramientas dedicadas para aplicaciones específicas.

FANUC ROBOGUIDE Software de simulación

HandlingPRO
Proceso de simulación y prueba de manipulación de materiales y realizar estudios de factibilidad para aplicaciones robóticas sin la necesidad de contar con el dispositivo en físico y el gasto de instalar un prototipo de celda de trabajo
OLPCPRO
Software de desarrollo de programa robótico compatible con el desarrollo y mantenimiento de KAREL y Teach Pendant.

PaintPRO
Solución de programación gráfica fuera de línea que simplifica la enseñanza de las rutas robóticas y el desarrollo de procesos de pintura. Contiene una funcionalidad especial para instalar el desplazamiento de la pistola de pintura, tamaño del spray, patrón de pintura, velocidad de pintura y temporizador de activación de la pistola.
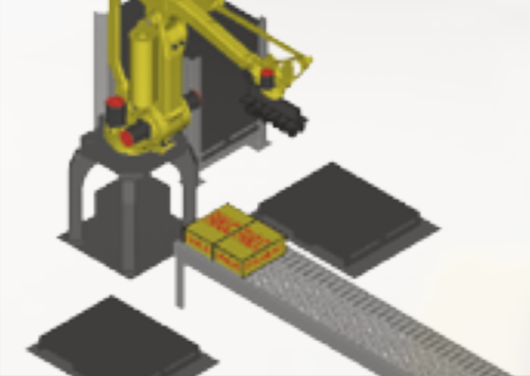
PalletPRO
Se puede utilizar para construir, depurar y probar completamente las aplicaciones de paletizado fuera de línea. Los datos creados en el PalletPRO se pueden descargar a un controlador de robot real que contiene el software PalletTool.
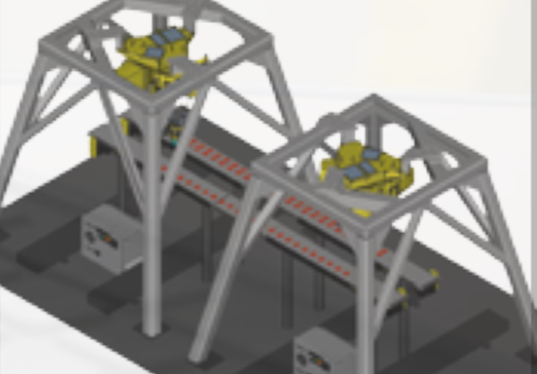
iRPickPRO
El último plug-in de FANUC para la herramienta de programación fuera de línea Roboguide permite al usuario simular aplicaciones de recoger y colocar de alta velocidad. iRPickPRO puede descargarse a un controlador de robot real que contiene el software iRPickPRO.
WeldPRO
Simulación de un proceso de soldadura curva robótica en un mundo de 3D. Control exclusivo con un Robot Virtual FANUC, WeldPRO cuenta con las herramientas de enseñanza de programación más precisas e información de tiempos de ciclo disponibles para cualquier paquete de simulación.
Características de Roboguide FANUC
- Programación CAD-to-Path – Creación sencilla de rutas robóticas desde datos CAD. El usuario define los requisitos del programa en el modelo CAD y el Roboguide® automáticamente genera el programa robótico.
- El Navegador del Proceso – Un entorno completamente integrado con interfaz gráfica de usuario que guía a los operadores nuevos y experimentados rápidamente por los pasos necesarios para instalar y simular una celda.
- La biblioteca de robots FANUC – Acceso rápido a cualquier robot FANUC para planos del sistema y simulación. Cada modelo de robot se presenta completo con un Controlador de Robot Virtual asociado y un modelo sólido de robot único para replicar la operación del robot de la manera más exacta posible en un entorno de simulación.
- Modelos CAD integrados – Acceso instantáneo a muchos dispositivos, mesas, bandas transportadoras y herramientas de extremo del brazo utilizados comúnmente. Formas geométricas en 3D simples adicionales incluidas como herramientas de modelado para crear máquinas personalizadas, herramientas y/o piezas.
- Importación de archivos CAD ( IGES) – modelos CAD de partes existentes, las piezas y pinzas se pueden importar directamente al Roboguide® para construir planos del sistema y evaluar la operación del sistema.
- Aprendizaje sencillo de robótica – Creación sencilla de rutas robóticas al enseñar posiciones en los modelos de las partes o al ingresar las coordenadas robóticas de forma manual. Se combina la innovadora herramienta de programación de arrastrar y soltar con un panel de movimiento manual estilo Teach Pendant.
- Instrucciones robóticas sencillas – Instrucciones de Teach Pendant estándar compatibles con el Roboguide® para desarrollar programas de Teach Pendant para la verificación de la producción.
- Verificación de alcance del robot – Una imagen 3D del entorno de trabajo del robot que ayuda al usuario a colocar las partes, piezas y otros componentes de la celda de forma efectiva dentro de la celda de trabajo.
- Validación del ciclo de tiempo – Tiempo de ciclo exacto y calculado generado al ejecutar el programa del robot en el modo de simulación.
- Detección de colisiones – Identificación visual de las colisiones durante la simulación del robot que permite la reubicación del robot, herramientas y/o partes antes de que el robot se instale en la planta.
- Perfilador – El perfilador del Teach Pendant de programación permite que los programas sean revisados rápidamente para medir los cuellos de botella y la desaceleración de las operaciones. Los problemas de procesamiento se solucionan antes de colocar el robot en la producción.
- Trazado TP – Una capacidad única de mostrar el movimiento real del robot comparado con el camino predeterminado en el Teach Pendant. Incluye el trazado del Teach Pendant en cuanto a la velocidad, orientación y aceleración, permitiendo retoques al programa del robot antes de instalar el robot.